Categories
plugin
Devoir de modélisation et de cinématique du premier semestre

la correction est en fin de sujet
[ lire entrée ] ( sb_view_counter_plural_pre104 lectures ) | permalien
Vous trouverez ici les supports de cours et de travaux dirigés pour les apprentis génie mécanique en première année du cycle ingénieur.
Le tout sous licence

le cours des semestres 5 et 6
les supports de TD des semestre 5 et 6
des TD complémentaires d'énergétique
Les fichiers sources (.odt) sont disponible sur demande auprès de laurent point granjon arobase enise point ec tiret du six lyon point fr.
[ lire entrée ] ( sb_view_counter_plural_pre131 lectures ) | permalien | à propos
Étude d'une grue embarquée

[ lire entrée ] ( sb_view_counter_plural_pre112 lectures ) | permalien
Sujet "Tracker solaire" Modélisation et cinématique 2021
[ lire entrée ] ( sb_view_counter_plural_pre107 lectures ) | permalien
Sujet de dynamique utilisant comme support l'ascenseur à peniche "roue de Falkirk", ascenseur à bateaux installé en Ecosse

Sujet et corrigé au format opendocument
[ lire entrée ] ( sb_view_counter_plural_pre588 lectures ) | permalien
Vous trouverez ici le sujet de fin de module de mécanique du semestre 2 basé sur un "handspinner"

correction après le sujet
[ lire entrée ] ( sb_view_counter_plural_pre566 lectures ) | permalien
Vous trouverez ici au format PDF le sujet de modélisation et de cinématique de 2015-2016. Le support est une scie sauteuse récupérée sur eduscol et remise en plan avec CATIA.

Le sujet vise à modéliser cette scie et à calculer les vitesses et accélération de cette scie, en tenant compte du roulement sans glissement au niveau des dents d'engrenage.
L'original du sujet (hors plans) et la correction sont ici
Le sujet ne vous ayant pas inspiré vous trouverez ci dessous le schema cinematique 3D animé (catiaV5 atelier DMU)

[ lire entrée ] ( sb_view_counter_plural_pre261 lectures ) | permalien
Sujet et corrigé du devoir de fin d'année portant sur une modélisation simplifiée à l'extrême d'un mécanisme de train d'atterrissage.

L'objet de l'étude est d'estimer l'effet gyroscopique dans une situation donnée
Un tel sujet avait déjà été traité en 2008-2009, le support est le même mais les questions sont posées différemment
[ lire entrée ] ( sb_view_counter_plural_pre382 lectures ) | permalien
sujet et corrigé du devoir du 17 mars 2015
Le sujet est de Jean Pierre Vassal, le corrigé de moi même. Il s'appuie sur un modèle numérique trouvé sur eduscol (grue d'atelier à vérin manuel), que nous avons modifié en remplaçant le vérin par un vérin standard.
Le sujet porte sur la modélisation du mécanisme, le calcul des équations de liaisons géométrique et des calculs de cinématique.
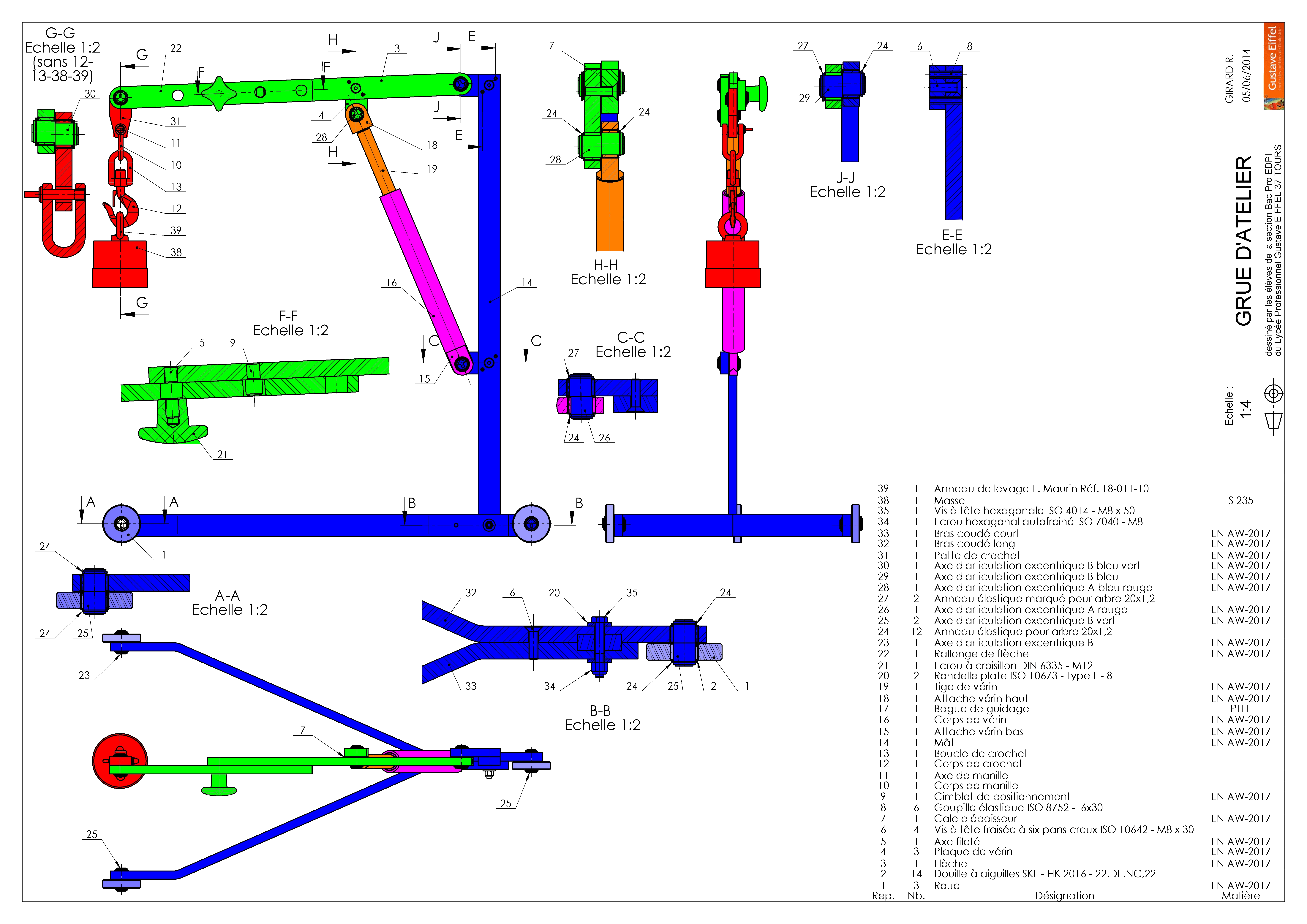
le sujet
les documents techniques
des éléments de correction
[ lire entrée ] ( sb_view_counter_plural_pre1568 lectures ) | permalien | à propos
Vérification des performances dynamique par la méthode énergétique
pour avoir le sujet, cliquer sur l'image

[ lire entrée ] ( sb_view_counter_plural_pre357 lectures ) | permalien
| 1 | 2 | 3 | Suivant> Dernier>>